- Arduino IDE: установка и настройка
- 1. Установка Arduino IDE под Windows
- Шаг 1
- Шаг 2
- 2. Запуск Arduino IDE
- 3. Подключение платы Arduino к компьютеру
- 4. Настройка Arduino IDE
- 5. Загрузка первого скетча
- Способы чтения и управления портами ввода-вывода Arduino
- Arduino. Работа с COM-портом
- Подготовка к работе
- Таблица ASCII
- Отправка команд с ПК
- Управление устройством через COM-порт
Arduino IDE: установка и настройка
Рассмотрим начало работы с Arduino IDE в операционной системе Windows на примере Uno. Для других плат разница минимальна — эти особенности перечислены на страницах описания конкретных плат.
1. Установка Arduino IDE под Windows
Установите на компьютер интегрированную среду разработки Arduino IDE.
Последняя стабильная версия всегда доступна на нашем сайте.
Шаг 1
Выберите версию среды в зависимости от операционной системы. 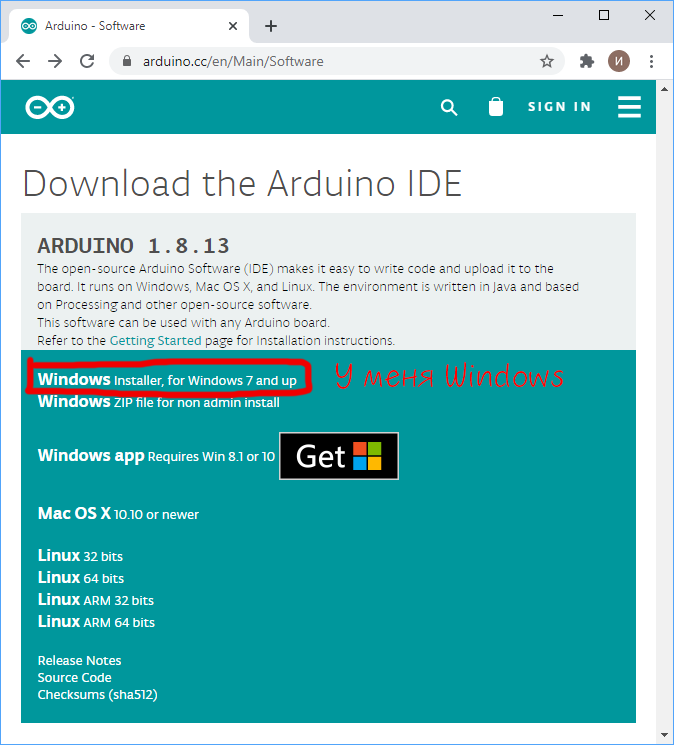
Шаг 2
Нажмите на кнопку «JUST DOWNLOAD» для бесплатной загрузки программы. 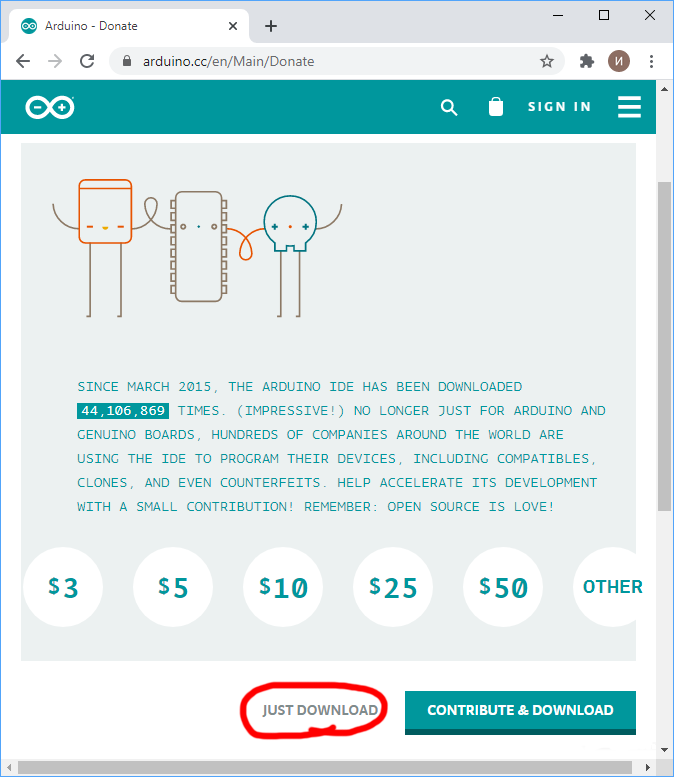
2. Запуск Arduino IDE
Запустите среду программирования. 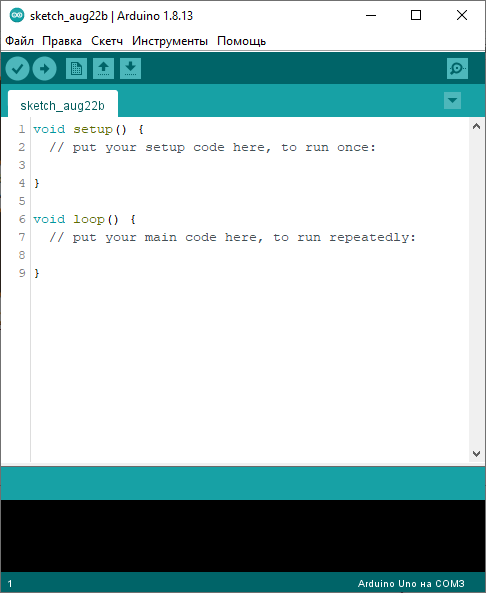
Arduino IDE не запускается?
Вероятнее всего, на компьютере некорректно установлена JRE — Java Runtime Environment. Для решения проблемы переустановите программу.
3. Подключение платы Arduino к компьютеру
Операционная система распознала плату Arduino как COM-порт и назначила номер 2 . Если вы подключите к компьютеру другую плату, операционная система назначит ей другой номер. Если у вас несколько платформ, очень важно не запутаться в номерах COM-портов.
Что-то пошло не так?
После подключения Arduino к компьютеру, в диспетчере устройств не появляются новые устройства? Это может быть следствием следующих причин:
4. Настройка Arduino IDE
Для работы среды Arduino IDE с конкретной платформой необходимо выбрать название модели и номер присвоенного плате COM-порта.
Поздравляем, среда Arduino IDE настроена для прошивки вашей платы.
Что-то пошло не так?
5. Загрузка первого скетча
Среда настроена, плата подключена. Пора прошивать платформу.
Arduino IDE содержит большой список готовых примеров, в которых можно быстро подсмотреть решение какой-либо задачи.
Источник
Способы чтения и управления портами ввода-вывода Arduino
Для взаимодействия с окружающим миром нужно настроить выводы микроконтроллера на приём или передачу сигнала. В результате каждый пин будет работать в режиме входа и выхода. На всеми любимой плате Arduino сделать это можно двумя способами, как именно вы узнаете из этой статьи.
Способ первый – стандартный язык для Arduino IDE
Всем известно, что Ардуино программируется на C++ с некоторой адаптацией и упрощениями для новичков. Он называется Wiring. Изначально все порты ардуино определяются как входы, и нет нужды задавать это в коде.
Порты обычно прописываются в функции инициализации переменных:
Для этого используется команда pinMode, у неё достаточно простой синтаксис, сначала указывается номер порта, затем его роль через запятую.
pinMode (nomer_porta, naznachenie)
С помощью этой команды внутренняя схема микроконтроллера конфигурируется определенным образом.
Есть три режима в которых может работать порт: INPUT – вход, в этом режиме происходит считывание данных с датчиков, состояния кнопок, аналогового и цифрового сигнала. Порт находится в т.н. высокоимпедансном состоянии, простыми словами – у входа высокое сопротивление. Устанавливается это значение, на примере 13 пина платы, при необходимости так:
pinMode (13, INPUT);
OUTPUT – выход, в зависимости от команды прописанной в коде порт принимает значение единицы или нуля. Выход становится своего рода управляемым источником питания и выдаёт максимальный ток (в нашем случае 20 мА и 40 мА в пике) в нагрузку к нему подключенную. Чтобы назначить порт как выход на Arduino нужно ввести:
pinMode (13, OUTPUT);
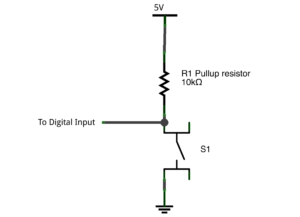
INPUT_PULLUP – порт работает как вход, но к нему подключается т.н. подтягивающий резистор в 20 кОм.
Условную внутреннюю схему порта в таком состоянии вы видите ниже. Особенностью этого входа является то, что входной сигнал воспринимается как проинвертированный («единица» на входе воспринимается микроконтроллером как «ноль»). В таком режиме вы можете не использовать внешние подтягивающие резисторы при работе с кнопками.
pinMode (13, INPUT_PULLUP);
Данные принимаются с портов и передают на них командами:
digitalWrite(пин, значение) – переводит выходной пин в логическую 1 или 0, соответственно на выходе появляется или исчезает напряжение 5В, например digitalWrite (13, HIGH) – подаёт 5 вольт (логическую единицу) на 13 пин, а digitalWrite (13, low) – переводит 13 пин в состояние логического ноля (0 вольт);
digitalRead(пин) – считывает значение со входа, пример digitalRead (10), считывает сигнал с 10 пина;
analogRead(пин) – считывает аналоговый сигнал с аналогового порта, вы получаете значение в диапазоне от 0 до 1023 (в пределах 10-битного АЦП), пример analogRead (3).
Способ два – управление портами через регистры Atmega и ускорение работы кода
Такое управление конечно простое, но в этом случае есть два недостатка – большее потребление памяти и низкое быстродействие при работе с портами. Но вспомните что такое Arduino независимо от варианта платы (uno, micro, nano)? В первую очередь, это микроконтроллер AVR семейства ATMEGA, в последнее время используется МК atmega328.
В Arduino IDE вы можете программировать на родном для этого семейства языке C AVR, так, как если бы вы работали с отдельным микроконтроллером. Но обо всем по порядку. Чтобы управлять портами Ардуино таким образом вам нужно сначала внимательно рассмотреть следующую иллюстрацию.
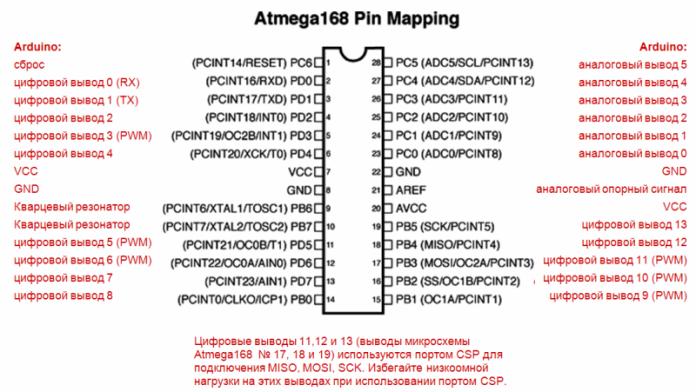
Возможно кому-то будет нагляднее изучать порты в таком виде (на рисунке тоже самое, но в другом оформлении):
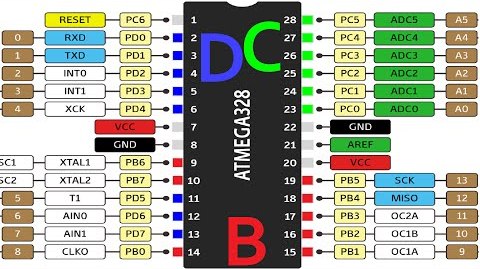
Здесь вы видите соответствие выводов Ардуино и названий портов атмеги. Итак, у нас есть 3 порта:
Исходя из изображенного на рисунках, я составил таблицу соответствия портов Ардуино и Атмеги, она пригодится вам в дальнейшем.
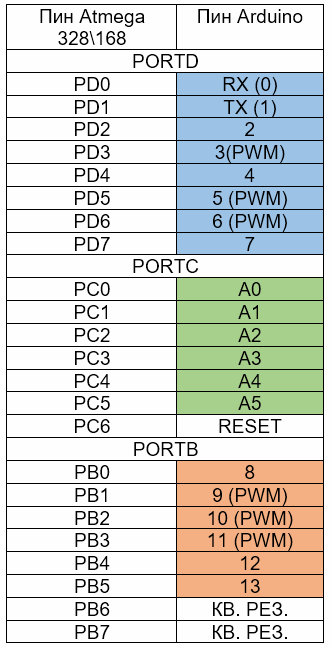
У Atmega есть три регистра длиной в 8 бит, которые управляют состоянием портов, например, порта B разберемся в их назначении проведя аналогии со стандартными средствами wiring описанными в начале статьи:
PORTB – Управление состоянием вывода. Если пин находится в режиме «Выхода», то 1 и 0 определяют наличие этих же сигналов на выходе. Если же пин находится в режиме «Входа», то 1 подключает подтягивающий резистор (тоже что и INPUT_PULLUP рассмотренный выше), если 0 – высокоимпедансное состояние (аналог INPUT);
PINB – регистр чтения. Соответственно в нём находится информация о текущем состоянии выводов порта (логическая единица или ноль).
DDRB – регистр направления порта. С его помощью вы указываете микроконтроллеру чем является порт – входом или выходом, при этом «1» — выход, а «0» — вход.
Вместо буквы «В» может быть любая другая согласно названиям портов, например, PORTD или PORTC аналогично работают и другие команды.
Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
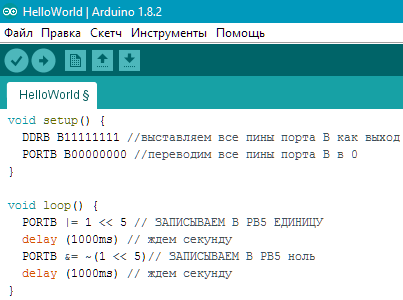
Помигаем светодиодом, заменим стандартную функцию digitalWrite(). Для начала вспомним как выглядит исходный пример из библиотеки Arduino IDE.
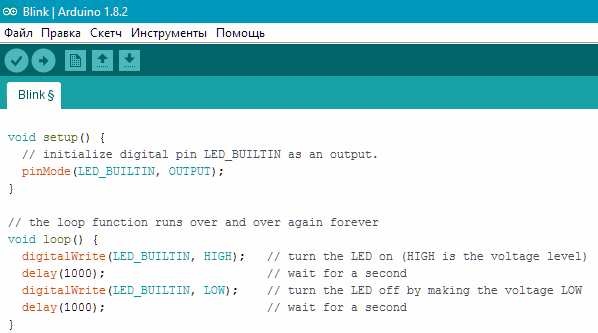
Это код всем известного «blink», который демонстрирует мигание светодиодом, встроенным в плату.
В комментариях даны пояснения к коду. Логика такой работы заключается в следующем.
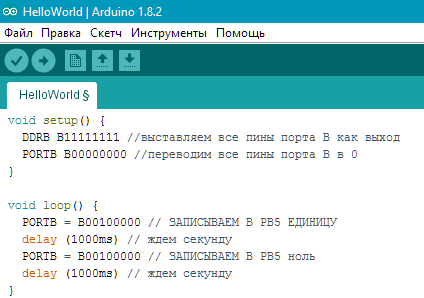
Команда PORTB B00100000 переводит PB5 в состояние логической единицы, смотрим, а те картинки и таблицу что расположены ниже и видим, что PB5 соответствует 13 пину Ардуины.
Буква «В» перед цифрами говорит о том, что мы в записываем значения в двоичном виде. Нумерация в двоичном коде идёт справа налево, т.е. здесь единица стоит в шестом с правого края бите, что говорит микроконтроллеру о взаимодействии с состоянием шестого бита регистра порта B (PB5). В таблице ниже изображена структура порта D, она аналогична и приведена для примера.

Вы можете задавать значение не в двоичном, а в шестнадцатеричном виде, например, для этого открываем калькулятор windows и в режиме «ВИД», выбираем вариант «Программист».
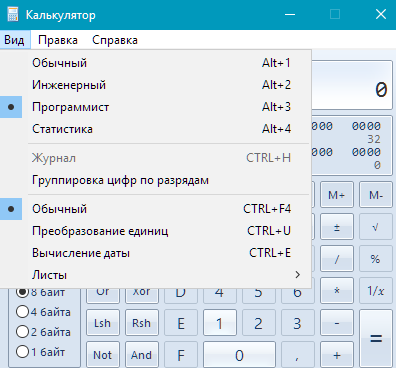
Вводим желаемое число:
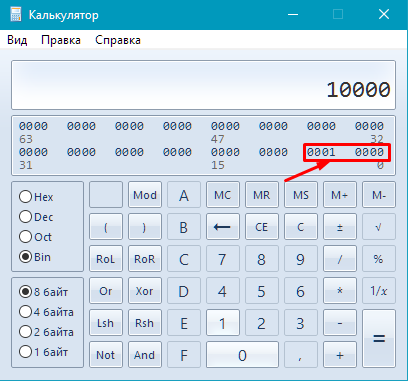
И нажимаем на HEX:
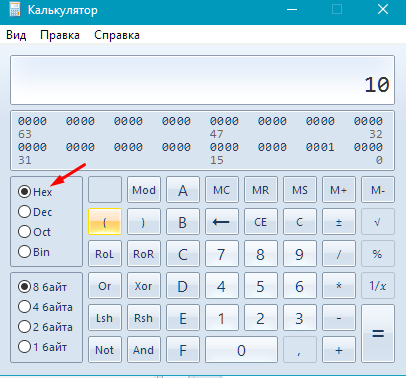
В таком случае переносим это всё в Arduino IDE, но уже вместо приставки «В» будет «0х».

Но при таком вводе возникает проблема. Если у вас к другим пинам подключено что-либо, то внося команду типа B00010000 – вы все выводы кроме 13 (PB5) обнулите. Вы можете вносить данные на каждый пин по отдельности. Это будет выглядеть следующим образом:
Такая запись может показаться непонятной, давайте разберемся.
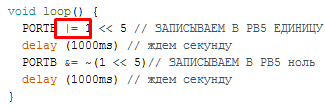
Это операция логического сложения, |= значит прибавить к содержимому порту что-либо.
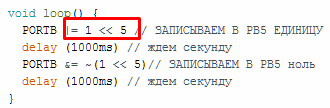
А это значит, что нужно сложить слово из 8 бит в регистре с единицей, смещенной на 5 бит – в результате, если было 11000010 получается 11010010. На этом примере видно, что изменился только PB5, остальные биты этого регистра остались без изменений, как и остались неизменными состояния выводов микроконтроллера.
Но при логическом сложении возникает проблема – вы не можете превратить единицу в ноль, потому что:
Нам на помощь придёт логическое умножение и инвертирование:
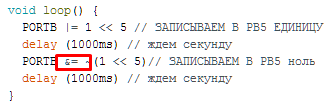
&= значит умножить содержимое порта на определенное число.
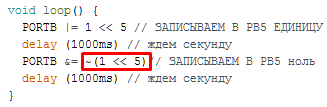
А это число, на которое мы умножает. Знак «
» обозначает инвертирование. В нашем случае проинвертированная единица является нулем. То есть мы умножаем содержимое порта на ноль, сдвинутый на 5 бит. Например, было 10110001, стало 10100001. Остальные биты остались без изменений.
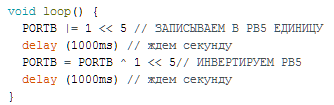
Тоже самое можно сделать с помощью операции инвертирования (^):
Чтение с портов, аналог digitalRead() выполняют с помощью регистра PIN, на практике это выглядит так:
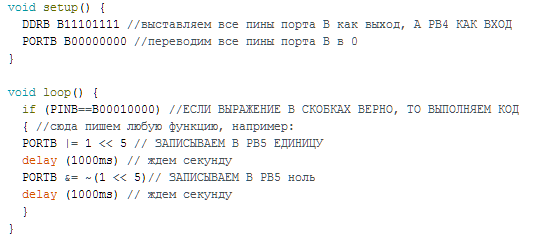
Здесь мы проверяем равно ли выражение в скобках реальному состоянию портов, т.е. аналогично тому, если бы мы написали if (digitalRead(12) == 1).
Пошаговое обучение программированию и созданию устройств на микроконтроллерах AVR: Программирование микроконтроллеров для начинающих
Заключение
Для чего такие сложности с управлением портами, если можно использовать стандартные удобные функции? Всё дело в быстродействии и размерах кода. При использовании второго способа, рассмотренного в статье размер кода, значительно снижается, а быстродействие увеличивается на несколько порядков. Стандартный digitalWrite() выполнялся за 1800 мкс, а запись прямо в порт за 0,2 мкс, а digitalRead() за 1900 мкс, а стал также за 0,2 мкс. Этот способ управления был найден на просторах сети и часто встречается в коде готовых проектов.
Любите умные гаджеты и DIY? Станьте специалистом в сфере Internet of Things и создайте сеть умных гаджетов!
Записывайтесь в онлайн-университет от GeekBrains:

Изучить C, механизмы отладки и программирования микроконтроллеров;
Получить опыт работы с реальными проектами, в команде и самостоятельно;
Получить удостоверение и сертификат, подтверждающие полученные знания.
Starter box для первых экспериментов в подарок!
После прохождения курса в вашем портфолио будет: метостанция с функцией часов и встроенной игрой, распределенная сеть устройств, устройства регулирования температуры (ПИД-регулятор), устройство контроля влажности воздуха, система умного полива растений, устройство контроля протечки воды.
Вы получите диплом о профессиональной переподготовке и электронный сертификат, которые можно добавить в портфолио и показать работодателю.
Источник
Arduino. Работа с COM-портом
Для связи микроконтроллера с компьютером чаще всего применяют COM-порт. В этой статье мы покажем, как передать команды управления из компьютера и передать данные с контроллера.
Подготовка к работе
Большинство микроконтроллеров обладают множеством портов ввода-вывода. Для связи с ПК наиболее пригоден из них протокол UART. Это протокол последовательной асинхронной передачи данных. Для его преобразования в интерфейс USB на плате есть конвертор USB-RS232 – FT232RL.
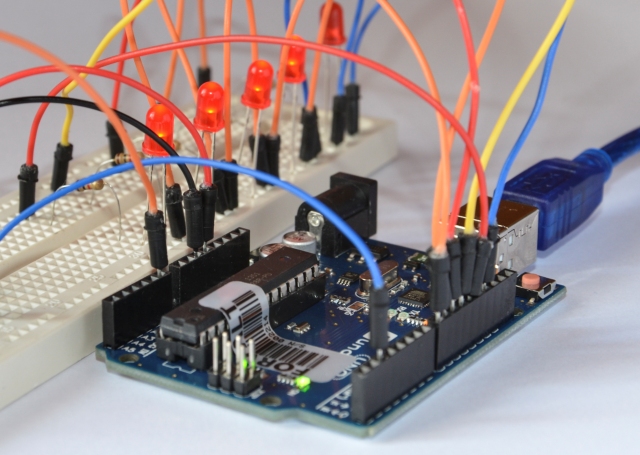
Для выполнения примеров их этой статьи вам будет достаточно только Arduino-совместимая плата. Мы используем EduBoard. Убедитесь, что на вашей плате установлен светодиод, подключенный к 13му выводу и есть кнопка для перезагрузки.
Таблица ASCII
Для примера загрузим на плату код, выводящий таблицу ASCII. ASCII представляет собой кодировку для представления десятичных цифр, латинского и национального алфавитов, знаков препинания и управляющих символов.
Переменная symbol хранит код символа. Таблица начинается со значения 33 и заканчивается на 126, поэтому изначально переменной symbol присваивается значение 33.
Для запуска работа порта UART служит функция Serial.begin(). Единственный ее параметр – это скорость. О скорости необходимо договариваться на передающей и приемной стороне заранее, так как протокол передачи асинхронный. В рассматриваемом примере скорость 9600бит/с.
Для записи значения в порт используются три функции:
- Serial.write() – записывает в порт данные в двоичном виде.
- Serial.print() может иметь много значений, но все они служат для вывода информации в удобной для человека форме. Например, если информация, указанная как параметр для передачи, выделена кавычками – терминальная программа выведет ее без изменения. Если вы хотите вывести какое-либо значение в определенной системе исчисления, то необходимо добавить служебное слово: BIN-двоичная, OCT – восьмеричная, DEC – десятичная, HEX – шестнадцатеричная. Например, Serial.print(25,HEX).
- Serial.println() делает то же, что и Serial.print(), но еще переводит строку после вывода информации.
Для проверки работы программы необходимо, чтобы на компьютере была терминальная программа, принимающая данные из COM-порта. В Arduino IDE уже встроена такая. Для ее вызова выберите в меню Сервис->Монитор порта. Окно этой утилиты очень просто:
![]()
Теперь нажмите кнопку перезагрузки. МК перезагрузится и выведет таблицу ASCII:
Обратите внимание на вот эту часть кода:
Она останавливает выполнение программы. Если вы ее исключите – таблица будет выводиться бесконечно.
Для закрепления полученных знаний попробуйте написать бесконечный цикл, который будет раз в секунду отправлять в последовательный порт ваше имя. В вывод добавьте номера шагов и не забудьте переводить строку после имени.
Отправка команд с ПК
Прежде чем этим заниматься, необходимо получить представление относительного того, как работает COM-порт.
В первую очередь весь обмен происходит через буфер памяти. То есть когда вы отправляете что-то с ПК устройству, данные помещаются в некоторый специальный раздел памяти. Как только устройство готово – оно вычитывает данные из буфера. Проверить состояние буфера позволяет функция Serial.avaliable(). Эта функция возвращает количество байт в буфере. Чтобы вычитать эти байты необходимо воспользоваться функцией Serial.read(). Рассмотрим работу этих функций на примере:
После того, как код будет загружен в память микроконтроллера, откройте монитор COM-порта. Введите один символ и нажмите Enter. В поле полученных данных вы увидите: “I received: X”, где вместо X будет введенный вами символ.
Программа бесконечно крутится в основном цикле. В тот момент, когда в порт записывается байт функция Serial.available() принимает значение 1, то есть выполняется условие Serial.available() > 0. Далее функция Serial.read() вычитывает этот байт, тем самым очищая буфер. После чего при помощи уже известных вам функций происходит вывод.
Использование встроенного в Arduino IDE монитора COM-порта имеет некоторые ограничения. При отправке данных из платы в COM-порт вывод можно организовать в произвольном формате. А при отправке из ПК к плате передача символов происходит в соответствии с таблицей ASCII. Это означает, что когда вы вводите, например символ “1”, через COM-порт отправляется в двоичном виде “00110001” (то есть “49” в десятичном виде).
Немного изменим код и проверим это утверждение:
После загрузки, в мониторе порта при отправке “1” вы увидите в ответ: “I received: 110001”. Можете изменить формат вывода и просмотреть, что принимает плата при других символах.
Управление устройством через COM-порт
Очевидно, что по командам с ПК можно управлять любыми функциями микроконтроллера. Загрузите программу, управляющую работой светодиода:
При отправке в COM-порт символа “H” происходит зажигание светодиода на 13ом выводе, а при отправке “L” светодиод будет гаснуть.
Если по результатам приема данных из COM-порта вы хотите, чтобы программа в основном цикле выполняла разные действия, можно выполнять проверку условий в основном цикле. Например:
Если в мониторе порта отправить значение “1” светодиод будет мигать с частотой 5Гц. Если отправить “0” – частота изменится на 1Гц.
Источник