Atmega16 не работает прерывание таймера
В этой статье будет рассмотрено использование таймеров в МК и способ подсоединения кнопок к нему.Сначала немного теории.
В МК ATMega16 есть три таймера/счетчика – два 8-битных (Timer/Counter0, Timer/Counter2) и один 16-битный (Timer/Counter1). Каждый из них содержит специальные регистры, одним из которых является счетный регистр TCNTn (n – это число 0, 1 или 2). Каждый раз, когда процессор выполняет одну команду, содержимое этого регистра увеличивается на единицу (либо каждые 8, 64, 256 или 1024 тактов). Потому он и называется счетным. Помимо него, есть еще и регистр сравнения OCRn (Output Compare Register), в который мы можем сами записать какое-либо число. У 8-битного счетчика эти регистры 8-битные. По мере выполнения программы содержимое TCNTn растет и в какой-то момент оно совпадет с содержимым OCRn. Тогда (если заданы специальные параметры) в регистре флагов прерываний TIFR (Timer/Counter Interrupt Flag Register) один из битов становится равен единице и процессор, видя запрос на прерывание, сразу же отрывается от выполнения бесконечного цикла и идет обслуживать прерывание таймера. После этого процесс повторяется.
Ниже представлена временная диаграмма режима CTC (Clear Timer on Compare). В этом режиме счетный регистр очищается в момент совпадения содержимого TCNTn и OCRn, соответственно меняется и период вызова прерывания.
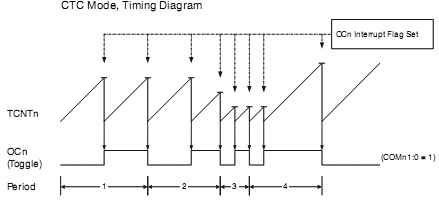
Это далеко не единственных режим работы таймера/счетчика. Можно не очищать счетный регистр в момент совпадения, тогда это будет режим генерации широтно-импульсной модуляции, который мы рассмотрим в следующей статье. Можно менять направление счета, т. е. содержимое счетного регистра будет уменьшаться по мере выполнения программы. Также возможно производить счет не по количеству выполненных процессором команд, а по количеству изменений уровня напряжения на «ножке» T0 или T1 (режим счетчика), можно автоматически, без участия процессора, менять состояние ножек OCn в зависимости от состояния таймера. Таймер/Счетчик1 умеет производить сравнение сразу по двум каналам – А или В.
Далее представлена функциональная схема таймера/счетчика0:
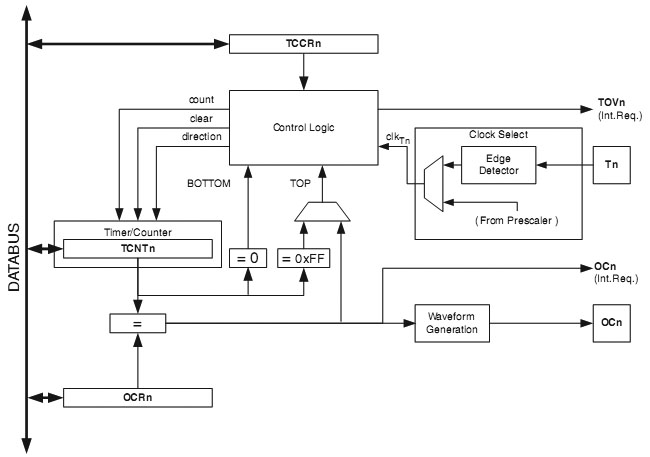
Для запуска таймера нужно выставить соответствующие биты в регистре управления таймером TCCRn (Timer/Counter Control Register), после чего он сразу же начинает свою работу.
Мы рассмотрим лишь некоторые режимы работы таймера. Если вам потребуется работа в другом режиме, то читайте Datasheet к ATMega16 – там все подробнейше по-английски написано, даны даже примеры программ на С и ассемблере (недаром же он занимает 357 страниц печатного текста!).
Теперь займемся кнопками.
Если мы собираемся использовать небольшое количество кнопок (до 9 штук), то подключать их следует между «землей» и выводами какого-либо порта микроконтроллера. При этом следует сделать эти выводы входами, для чего установить соответствующие биты в регистре DDRx и включить внутренний подтягивающий резистор установкой битов в регистре PORTx. При этом на данных «ножках» окажется напряжение 5 В. При нажатии кнопки вход МК замыкается на GND и напряжение на нем падает до нуля (а может быть и наоборот – вывод МК замкнут на землю в отжатом состоянии). При этом меняется регистр PINx, в котором хранится текущее состояние порта (в отличие от PORTx, в котором установлено состояние порта при отсутствии нагрузки, т. е. до нажатия каких-либо кнопок). Считывая периодически состояние PINx, можно определить, что нажата кнопка.
ВНИМАНИЕ! Если соответствующий бит в регистре DDRx будет установлен в 1 для вашей кнопки, то хорошее нажатие на кнопку может привести к небольшому пиротехническому эффекту – возникновению дыма вокруг МК. Естественно, МК после этого придется отправить в мусорное ведро…
Перейдем к практической части. Создайте в IAR новое рабочее пространство и новый проект с именем, например, TimerButton. Установите опции проекта так, как это описано в предыдущей статье. А теперь наберем следующий небольшой код.
Давайте посмотрим, как это работает. В функциях init_timern задаются биты в регистрах TCCRn, OCRn и TIMSK, причем такой способ может кому-нибудь показаться странным или незнакомым. Придется объяснить сначала, что означает запись «(1 © KERNELCHIP 2006 — 2021
Источник
Введение
Таймер-счетчик является одним из самых ходовых ресурсов AVR микроконтроллера. Его основное назначение — отсчитывать заданные временные интервалы. Кроме того, таймеры-счетчики могут выполнять ряд дополнительных функций, как то — формирование ШИМ сигналов, подсчет длительности и количества входящих импульсов. Для этого существуют специальные режимы работы таймера-счетчика.
В зависимости от модели микроконтроллера количество таймеров и набор их функций может отличаться. Например, у микроконтроллера Atmega16 три таймера-счетчика — два 8-ми разрядных таймера-счетчика Т0 и Т2, и один 16-ти разрядный — Т1. В этой статье, на примере ATmega16, мы разберем как использовать таймер-счетчик Т0.
Используемые выводы
Таймер-счетчик Т0 использует два вывода микроконтроллера ATmega16. Вывод T0 (PB0) — это вход внешнего тактового сигнала. Он может применяться, например, для подсчета импульсов. Вывод OC0 (PB3) — это выход схемы сравнения таймера-счетчика. На этом выводе с помощью таймера может формировать меандр или ШИМ сигнал. Также он может просто менять свое состояние при срабатывании схемы сравнения, но об этом поговорим позже.
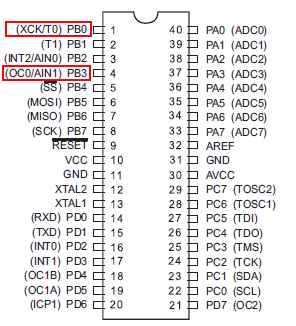
Выводы T0 и OC0 задействуются только при соответствующих настройках таймера, в обычном состоянии это выводы общего назначения.
Регистры таймера-счетчика Т0
Хоть это и скучно, но регистры — это то, без чего невозможно программировать микроконтроллеры, конечно, если вы не сидите плотно на Arduino. Так вот, таймер Т0 имеет в своем составе три регистра:
— счетный регистр TCNT0,
— регистр сравнения OCR0,
— конфигурационный регистр TCCR0.
Кроме того, есть еще три регистра, относящиеся ко всем трем таймерам ATmega16:
— конфигурационный регистр TIMSK,
— статусный регистр TIFR.
— регистр специальных функций SFIOR
Начнем с самого простого.

Это 8-ми разрядный счетный регистр. Когда таймер работает, по каждому импульсу тактового сигнала значение TCNT0 изменяется на единицу. В зависимости от режима работы таймера, счетный регистр может или увеличиваться, или уменьшаться.
Регистр TCNT0 можно как читать, так и записывать. Последнее используется когда требуется задать его начальное значение. Когда таймер работает, изменять его содержимое TCNT0 не рекомендуется, так как это блокирует схему сравнения на один такт.
OCR0

Это 8-ми разрядный регистр сравнения. Его значение постоянно сравнивается со счетным регистром TCNT0, и в случае совпадения таймер может выполнять какие-то действия — вызывать прерывание, менять состояние вывода OC0 и т.д. в зависимости от режима работы.
Значение OCR0 можно как читать, так и записывать.
TCCR0 (Timer/Counter Control Register)

Это конфигурационный регистр таймера-счетчика Т0, он определяет источник тактирования таймера, коэффициент предделителя, режим работы таймера-счетчика Т0 и поведение вывода OC0. По сути, самый важный регистр.
Биты CS02, CS01, CS00 (Clock Select) — определяют источник тактовой частоты для таймера Т0 и задают коэффициент предделителя. Все возможные состояния описаны в таблице ниже.
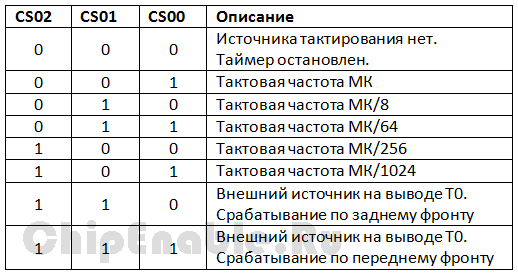
Как видите, таймер-счетчик может быть остановлен, может тактироваться от внутренней частоты и также может тактироваться от сигнала на выводе Т0.
Биты WGM10, WGM00 (Wave Generator Mode) — определяют режим работы таймера-счетчика Т0. Всего их может быть четыре — нормальный режим (normal), сброс таймера при совпадении (CTC), и два режима широтно-импульсной модуляции (FastPWM и Phase Correct PWM). Все возможные значения описаны в таблице ниже.
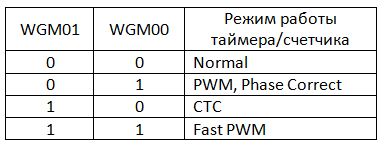
Более подробно будем разбирать режимы в коде. Сейчас все нюансы все равно не запомнятся.
Биты COM01, COM00 (Compare Match Output Mode) — определяют поведение вывода OC0. Если хоть один из этих битов установлен в 1, то вывод OC0 перестает функционировать как обычный вывод общего назначения и подключается к схеме сравнения таймера счетчика Т0. Однако при этом он должен быть еще настроен как выход.
Поведение вывода OC0 зависит от режима работы таймера-счетчика Т0. В режимах normal и СTC вывод OC0 ведет себя одинаково, а вот в режимах широтно-импульсной модуляции его поведение отличается. Не будем сейчас забивать себе голову всеми этими вариантами и разбирать таблицы для каждого режима, оставим это на практическую часть.
И последний бит регистра TCCR0 — это бит FOC0 (Force Output Compare). Этот бит предназначен для принудительного изменения состояния вывода OC0. Он работает только для режимов Normal и CTC. При установки бита FOC0 в единицу состояние вывода меняется соответственно значениям битов COM01, COM00. FOC0 бит не вызывает прерывания и не сбрасывает таймер в CTC режиме.
TIMSK (Timer/Counter Interrupt Mask Register)

Общий регистр для всех трех таймеров ATmega16, он содержит флаги разрешения прерываний. Таймер Т0 может вызывать прерывания при переполнении счетного регистра TCNT0 и при совпадении счетного регистра с регистром сравнения OCR0. Соответственно для таймера Т0 в регистре TIMSK зарезервированы два бита — это TOIE0 и OCIE0. Остальные биты относятся к другим таймерам.
TOIE0 — 0-е значение бита запрещает прерывание по событию переполнение, 1 — разрешает.
OCIE0 — 0-е значение запрещает прерывания по событию совпадение, а 1 разрешает.
Естественно прерывания будут вызываться, только если установлен бит глобального разрешения прерываний — бит I регистра SREG.
TIFR (Timer/Counter0 Interrupt Flag Register)

Общий для всех трех таймеров-счетчиков регистр. Содержит статусные флаги, которые устанавливаются при возникновении событий. Для таймера Т0 — это переполнение счетного регистра TCNT0 и совпадение счетного регистра с регистром сравнения OCR0.
Если в эти моменты в регистре TIMSK разрешены прерывания и установлен бит I, то микроконтроллер вызовет соответствующий обработчик.
Флаги автоматически очищаются при запуске обработчика прерывания. Также это можно сделать программно, записав 1 в соответствующий флаг.
TOV0 — устанавливается в 1 при переполнении счетного регистра.
OCF0 — устанавливается в 1 при совпадении счетного регистра с регистром сравнения
SFIOR (Special Function IO Register)

Начинающему про этот регистр в принципе можно и не знать, один из его разрядов сбросывает 10-ти разрядный двоичный счетчик, который делит входную частоту для таймера Т0 и таймера Т1.
Сброс осуществляется при установке бита PSR10 (Prescaler Reset Timer/Counter1 и Timer/Counter0) в единицу.
Заключение
Нудная часть закончена. Далее разберем как настроить таймер на определенную частоту, как таймер ведет себя в разных режимах, как генерировать ШИМ сигнал.
Источник
Arduino и прерывания таймера
Привет, Хабр! Представляю вашему вниманию перевод статьи «Timer interrupts» автора E.
Предисловие
Плата Arduino позволяет быстро и минимальными средствами решить самые разные задачи. Но там где нужны произвольные интервалы времени (периодический опрос датчиков, высокоточные ШИМ сигналы, импульсы большой длительности) стандартные библиотечные функции задержки не удобны. На время их действия скетч приостанавливается и управлять им становится невозможно.
В подобной ситуации лучше использовать встроенные AVR таймеры. Как это сделать и не заблудиться в технических дебрях даташитов, рассказывает удачная статья, перевод которой и предлагается вашему вниманию.

В этой статье обсуждаются таймеры AVR и Arduino и то, как их использовать в Arduino проектах и схемах пользователя.
Что такое таймер?
Как и в повседневной жизни в микроконтроллерах таймер это некоторая вещь, которая может подать сигнал в будущем, в тот момент который вы установите. Когда этот момент наступает, вызывается прерывание микроконтроллера, напоминая ему что-нибудь сделать, например выполнить определенный фрагмент кода.
Таймеры, как и внешние прерывания, работают независимо от основной программы. Вместо выполнения циклов или повторяющегося вызова задержки millis() вы можете назначить таймеру делать свою работу, в то время как ваш код делает другие вещи.
Итак, предположим, что имеется устройство, которое должно что-то делать, например мигать светодиодом каждые 5 секунд. Если не использовать таймеры, а писать обычный код, то надо установить переменную в момент зажигания светодиода и постоянно проверять не наступил ли момент ее переключения. С прерыванием по таймеру вам достаточно настроить прерывание, и затем запустить таймер. Светодиод будет мигать точно вовремя, независимо от действий основной программы.
Как работает таймер?
Он действует путем увеличения переменной, называемой счетным регистром. Счетный регистр может считать до определенной величины, зависящей от его размера. Таймер увеличивает свой счетчик раз за разом пока не достигнет максимальной величины, в этой точке счетчик переполнится и сбросится обратно в ноль. Таймер обычно устанавливает бит флага, чтобы дать вам знать, что переполнение произошло.
Вы можете проверять этот флаг вручную или можете сделать таймерный переключатель — вызывать прерывание автоматически в момент установки флага. Подобно всяким другим прерываниям вы можете назначить служебную подпрограмму прерывания (Interrupt Service Routine или ISR), чтобы выполнить заданный код, когда таймер переполнится. ISR сама сбросит флаг переполнения, поэтому использование прерываний обычно лучший выбор из-за простоты и скорости.
Чтобы увеличивать значения счетчика через точные интервалы времени, таймер надо подключить к тактовому источнику. Тактовый источник генерирует постоянно повторяющийся сигнал. Каждый раз, когда таймер обнаруживает этот сигнал, он увеличивает значение счетчика на единицу. Поскольку таймер работает от тактового источника, наименьшей измеряемой единицей времени является период такта. Если вы подключите тактовый сигнал частотой 1 МГц, то разрешение таймера (или период таймера) будет:
T = 1 / f (f это тактовая частота)
T = 1 / 1 МГц = 1 / 10^6 Гц
T = (1 ∗ 10^-6) с
Таким образом разрешение таймера одна миллионная доля секунды. Хотя вы можете применить для таймеров внешний тактовый источник, в большинстве случаев используется внутренний источник самого чипа.
Типы таймеров
В стандартных платах Arduino на 8 битном AVR чипе имеется сразу несколько таймеров. У чипов Atmega168 и Atmega328 есть три таймера Timer0, Timer1 и Timer2. Они также имеют сторожевой таймер, который можно использовать для защиты от сбоев или как механизм программного сброса. Вот некоторые особенности каждого таймера.
Timer0:
Timer0 является 8 битным таймером, это означает, что его счетный регистр может хранить числа вплоть до 255 (т. е. байт без знака). Timer0 используется стандартными временными функциями Arduino такими как delay() и millis(), так что лучше не запутывать его если вас заботят последствия.
Timer1:
Timer1 это 16 битный таймер с максимальным значением счета 65535 (целое без знака). Этот таймер использует библиотека Arduino Servo, учитывайте это если применяете его в своих проектах.
Timer2:
Timer2 — 8 битный и очень похож на Timer0. Он используется в Arduino функции tone().
Timer3, Timer4, Timer5:
Чипы ATmega1280 и ATmega2560 (установлены в вариантах Arduino Mega) имеют три добавочных таймера. Все они 16 битные и работают аналогично Timer1.
Конфигурация регистров
Для того чтобы использовать эти таймеры в AVR есть регистры настроек. Таймеры содержат множество таких регистров. Два из них — регистры управления таймера/счетчика содержат установочные переменные и называются TCCRxA и TCCRxB, где x — номер таймера (TCCR1A и TCCR1B, и т. п.). Каждый регистр содержит 8 бит и каждый бит хранит конфигурационную переменную. Вот сведения из даташита Atmega328:
| TCCR1A | ||||||||
|---|---|---|---|---|---|---|---|---|
| Бит | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 0x80 | COM1A1 | COM1A0 | COM1B1 | COM1B0 | — | — | WGM11 | WGM10 |
| ReadWrite | RW | RW | RW | RW | R | R | RW | RW |
| Начальное значение | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| TCCR1B | ||||||||
|---|---|---|---|---|---|---|---|---|
| Бит | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 0x81 | ICNC1 | ICES1 | — | WGM13 | WGM12 | CS12 | CS11 | CS10 |
| ReadWrite | RW | RW | R | RW | RW | RW | RW | RW |
| Начальное значение | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Наиболее важными являются три последние бита в TCCR1B: CS12, CS11 и CS10. Они определяют тактовую частоту таймера. Выбирая их в разных комбинациях вы можете приказать таймеру действовать на различных скоростях. Вот таблица из даташита, описывающая действие битов выбора:
| CS12 | CS11 | CS10 | Действие |
|---|---|---|---|
| 0 | 0 | 0 | Нет тактового источника (Timer/Counter остановлен) |
| 0 | 0 | 1 | clk_io/1 (нет деления) |
| 0 | 1 | 0 | clk_io/8 (делитель частоты) |
| 0 | 1 | 1 | clk_io/64 (делитель частоты) |
| 1 | 0 | 0 | clk_io/256 (делитель частоты) |
| 1 | 0 | 1 | clk_io/1024 (делитель частоты) |
| 1 | 1 | 0 | Внешний тактовый источник на выводе T1. Тактирование по спаду |
| 1 | 1 | 1 | Внешний тактовый источник на выводе T1. Тактирование по фронту |
По умолчанию все эти биты установлены на ноль.
Допустим вы хотите, чтобы Timer1 работал на тактовой частоте с одним отсчетом на период. Когда он переполнится, вы хотите вызвать подпрограмму прерывания, которая переключает светодиод, подсоединенный к ножке 13, в состояние включено или выключено. Для этого примера запишем Arduino код, но будем использовать процедуры и функции библиотеки avr-libc всегда, когда это не делает вещи слишком сложными. Сторонники чистого AVR могут адаптировать код по своему усмотрению.
Сначала инициализируем таймер:
Регистр TIMSK1 это регистр маски прерываний Таймера/Счетчика1. Он контролирует прерывания, которые таймер может вызвать. Установка бита TOIE1 приказывает таймеру вызвать прерывание когда таймер переполняется. Подробнее об этом позже.
Когда вы устанавливаете бит CS10, таймер начинает считать и, как только возникает прерывание по переполнению, вызывается ISR(TIMER1_OVF_vect). Это происходит всегда когда таймер переполняется.
Дальше определим функцию прерывания ISR:
Сейчас мы можем определить цикл loop() и переключать светодиод независимо от того, что происходит в главной программе. Чтобы выключить таймер, установите TCCR1B=0 в любое время.
Как часто будет мигать светодиод?
Timer1 установлен на прерывание по переполнению и давайте предположим, что вы используете Atmega328 с тактовой частотой 16 МГц. Поскольку таймер 16-битный, он может считать до максимального значения (2^16 – 1), или 65535. При 16 МГц цикл выполняется 1/(16 ∗ 10^6) секунды или 6.25e-8 с. Это означает что 65535 отсчетов произойдут за (65535 ∗ 6.25e-8 с) и ISR будет вызываться примерно через 0,0041 с. И так раз за разом, каждую четырехтысячную секунды. Это слишком быстро, чтобы увидеть мерцание.
Если мы подадим на светодиод очень быстрый ШИМ сигнал с 50% заполнением, то свечение будет казаться непрерывным, но менее ярким чем обычно. Подобный эксперимент показывает удивительную мощь микроконтроллеров — даже недорогой 8-битный чип может обрабатывать информацию намного быстрей чем мы способны обнаружить.
Делитель таймера и режим CTC
Чтобы управлять периодом, вы можете использовать делитель, который позволяет поделить тактовый сигнал на различные степени двойки и увеличить период таймера. Например, вы бы хотели мигания светодиода с интервалом одна секунда. В регистре TCCR1B есть три бита CS устанавливающие наиболее подходящее разрешение. Если установить биты CS10 и CS12 используя:
то частота тактового источника поделится на 1024. Это дает разрешение таймера 1/(16 ∗ 10^6 / 1024) или 6.4e-5 с. Теперь таймер будет переполняться каждые (65535 ∗ 6.4e-5с) или за 4,194с. Это слишком долго.
Но есть и другой режим AVR таймера. Он называется сброс таймера по совпадению или CTC. Вместо счета до переполнения, таймер сравнивает свой счетчик с переменой которая ранее сохранена в регистре. Когда счет совпадет с этой переменной, таймер может либо установить флаг, либо вызвать прерывание, точно так же как и в случае переполнения.
Чтобы использовать режим CTC надо понять, сколько циклов вам нужно, чтобы получить интервал в одну секунду. Предположим, что коэффициент деления по-прежнему равен 1024.
Расчет будет следующий:
Вы должны добавить дополнительную единицу к числу отсчетов потому что в CTC режиме при совпадении счетчика с заданным значением он сбросит сам себя в ноль. Сброс занимает один тактовый период, который надо учесть в расчетах. Во многих случаях ошибка в один период не слишком значима, но в высокоточных задачах она может быть критичной.
Функция настройки setup() будет такая:
Также нужно заменить прерывание по переполнению на прерывание по совпадению:
Сейчас светодиод будет зажигаться и гаснуть ровно на одну секунду. А вы можете делать все что угодно в цикле loop(). Пока вы не измените настройки таймера, программа никак не связана с прерываниями. У вас нет ограничений на использование таймера с разными режимами и настройками делителя.
Вот полный стартовый пример который вы можете использовать как основу для собственных проектов:
Помните, что вы можете использовать встроенные ISR функции для расширения функций таймера. Например вам требуется опрашивать датчик каждые 10 секунд. Но установок таймера, обеспечивающих такой долгий счет без переполнения нет. Однако можно использовать ISR чтобы инкрементировать счетную переменную раз в секунду и затем опрашивать датчик когда переменная достигнет 10. С использованием СТС режима из предыдущего примера прерывание могло бы выглядеть так:
Поскольку переменная будет модифицироваться внутри ISR она должна быть декларирована как volatile. Поэтому, при описании переменных в начале программы вам надо написать:
Послесловие переводчика
В свое время эта статья сэкономила мне немало времени при разработке прототипа измерительного генератора. Надеюсь, что она окажется полезной и другим читателям.
Источник