Контуры регулирования сервосистемы. Что это
Серводвигатели работают в замкнутой системе, которая включает устройство обратной связи, привод (усилитель) и контроллер. Контроллер использует выходной сигнал устройства обратной связи для сравнения заданного значения (положения, скорости или крутящего момента) с достигнутым значением и выдает команды приводу для исправления любых ошибок. Этот процесс отслеживания обратной связи и внесения исправлений называется контуром управления. В зависимости от приложения и требований к производительности сервосистема может включать любую комбинацию трех типов контуров управления: контур положения, контур скорости и / или контур тока.
Сервоприводы часто имеют структуру с несколькими контурами, при этом текущий контур вложен внутри контура скорости, который вложен внутри контура положения. Изображение предоставлено: nctu.edu
Контур скорости
Контур скорости является наиболее распространенным контуром сервоуправления. Он сравнивает заданную скорость с фактической скоростью с помощью тахометра или энкодера и выдает команды для увеличения или уменьшения скорости двигателя соответственно. Контур скорости также называется ПИ-регулятором, поскольку он обычно использует как пропорциональное усиление (Kvp), так и интегральное усиление (Kvi) для определения команды коррекции. Величина пропорционального усиления, как следует из названия, прямо пропорциональна величине ошибки, в то время как интегральное усиление увеличивается со временем и используется, чтобы «подтолкнуть» двигатель к нулю ошибки в конце перемещения. Коэффициенты усиления обратной связи сервопривода, известные как пропорциональное усиление, интегральное усиление и производное усиление, определяют, насколько сильно сервопривод пытается исправить или уменьшить ошибку между заданным значением и фактическим значением.
Контур положения
Для приложений, требующих управления положением, контур положения добавляется «вокруг» контура скорости в так называемом каскадном контуре положения / скорости. Контур положения определяет следующую ошибку, которая представляет собой отклонение между фактическим и заданным положением, и выдает команды скорости для уменьшения или устранения следующей ошибки. В каскадной системе позиционный контур обычно использует только пропорциональное усиление Kp. Сервосистемы могут использовать контур положения без контура скорости, хотя обратная связь по скорости обеспечивает дополнительную жесткость и противодействует высокочастотным возмущениям. В случаях, когда контур положения используется сам по себе, без контура скорости, контур положения будет ПИД-регулятором. Использование всех трех коэффициентов усиления — пропорционального, интегрального и производного — хотя и является более сложным, позволяет настроить систему на оптимальную производительность.
Контур тока
Текущее управление необходимо, когда требуемое время отклика велико, как в случае многих промышленных сервоприводов. Основная цель токового контура — управлять крутящим моментом, который влияет на скорость и, следовательно, на положение. Текущий цикл обычно вложен внутри цикла скорости, делая текущий самый внутренний цикл, с циклом скорости в середине, а цикл позиционирования является самым внешним циклом. Токовые контуры обычно представляют собой ПИ-регуляторы с пропорциональным и интегральным усилением. Текущие параметры управления часто устанавливаются производителем, что экономит время и усилия пользователя на настройку текущего контура управления.
Пропускная способность
В любой каскадной системе время отклика или пропускная способность внутреннего цикла должно быть меньше времени отклика внешнего цикла. В противном случае внутренний цикл мало повлияет на внешний. Общее правило для вложенных контуров сервоуправления состоит в том, что контур скорости должен иметь полосу пропускания в 5-10 раз больше, чем контур положения, а текущий контур должен иметь полосу пропускания, в 5-10 раз превышающую полосу пропускания контура скорости. , В общем, более высокая полоса пропускания лучше, но поскольку полоса пропускания одного контура влияет на следующий контур внутри него, увеличение пропускной способности контура положения приводит к увеличению требуемой полосы пропускания контура скорости. Точно так же увеличение полосы пропускания контура скорости приводит к увеличению требуемой полосы пропускания контура тока. В обоих случаях увеличение пропускной способности одного цикла до такой степени, что требуемая полоса пропускания следующего, вложенного цикла недостижима, не влияет на производительность системы.
Источник
Настройка контура регулирования положения
Читайте также:
|
 .
.



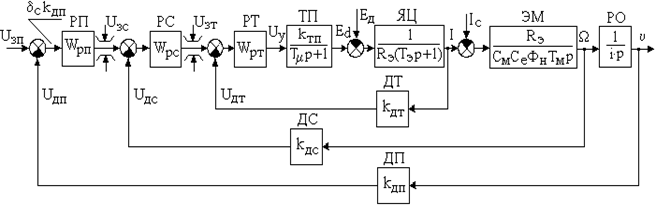 Рисунок 6.1 Рисунок 6.1 |
Возможны три режима работы позиционного АЭП:
1) Режим малых перемещений, при котором не один из регуляторов не выходит на ограничение, т.е. система ведет себя как линейная.
2) Режим средних перемещений – в этом режиме регуляторы положения и скорости выходят на ограничение, т.е. система перестает быть линейной, но скорость в процессе отработки не выходит на максимальный установившийся уровень. Тахограмма режима средних перемещений изображена на рисунке 6.2.
3) Режим больших перемещений – регуляторы положения и скорости выходят на ограничение, привод разгоняется до максимальной скорости, некоторое время на ней работает. Тахограмма режима больших перемещений, в соответствии с рисунком 6.3, имеет вид трапеции.
 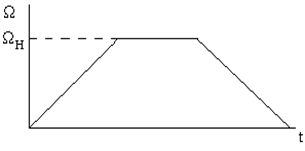 Рисунок 6.2 Рисунок 6.3 Рисунок 6.2 Рисунок 6.3 |
Полагаем, что контура тока и скорости уже оптимизированы и остается оптимизировать только контур положения. Тогда структурная схема примет вид, представленный на рисунке 6.4.
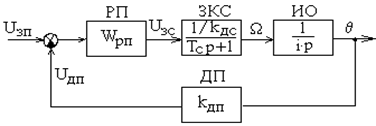 Рисунок 6.4 Рисунок 6.4 |
Передаточная функция замкнутого контура скорости, оптимизированного на модульный оптимум имеет вид
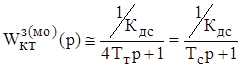 ,
,
где Тс = 4Тт – малая постоянная времени оптимизированного контура скорости (Т смо = 2Тт, Тс СО = 4Тт).
Настроим контур на модульный оптимум. При такой настройке ЛАЧХ имеет вид, представленный на рисунке 6.5.
Тогда передаточная функция разомкнутого контура положения, настроенного на модульный оптимум, примет вид
 ,
,
где Кдп, Кдс – коэффициент передачи датчика положения и скорости соответственно.
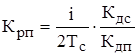
Передаточная функция регулятора положения будет равна
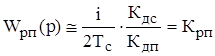 ,
,
где i – передаточное число редуктора.
 .
.
Получили П-регулятор положения и астатическую систему по заданию.
 ,
,
где Тп = 2Тс – эквивалентная постоянная времени оптимизированного на модульный оптимум контура положения.
Полученная система по заданию является астатической 1-го порядка по заданию. Если контур скорости был оптимизирован на СО и регулятор скорости был ПИ, то данный контур положения будет астатическим даже с П-регулятором.
Знак ошибки зависит от направления действия статического активного момента (см. рисунок 6.6).
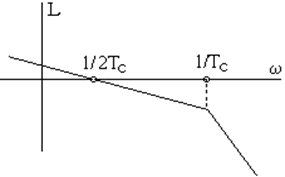 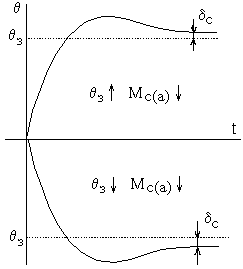 Рисунок 6.5 Рисунок 6.6 Рисунок 6.5 Рисунок 6.6 |
Оценим точность позиционной системы (см. рисунок 6.7).
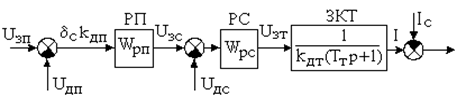 Рисунок 6.7 Рисунок 6.7 |
 ;
;  ;
;
 – фактическое значение перемещения.
– фактическое значение перемещения.
По аналогии находим заданное перемещение
 .
.
Считаем, что коэффициент регулятора по заданию и каналу ОС одинаковы, т.е. Rзп = Rдп.
Определим величину ошибки
 ;
;
 – не зависит от величины задающего сигнала, а зависит от момента на валу и параметров системы.
– не зависит от величины задающего сигнала, а зависит от момента на валу и параметров системы.
Если контур скорости настроен на СО (регулятор скорости ПИ), то 
Источник
Расчет системы управления позиционированием электропривода в режиме малых перемещений: Методические указания к выполнению практической работы , страница 3
1) Рассчитаем недостающие параметры.
Номинальная угловая скорость:
 , рад/с.
, рад/с.
Коэффициент ЭДС kЕ:
 , В·с.
, В·с.
Коэффициент момента kМ:
 , Н·м А -1 .
, Н·м А -1 .
Электромагнитная постоянная времени двигателя:
 с.
с.
Механическая постоянная времени двигателя:
 с.
с.
Вспомогательный коэффициент k0:
 , А/В.
, А/В.
Величины коэффициентов усиления датчиков тока kДТ и скорости kДС определяются выражениями:
 ;
;
 ,
,
где UMAX максимально допустимое выходное напряжение регуляторов. Исходя из того, что большинство операционных усилителей питаются напряжением ±12 В, принимаем UMAX =10В. Тогда:
 ;
;
 .
.
Принимаем, что двигатель получает питание от трехфазного тиристорного преобразователя, собранного по схеме Ларионова, тогда некомпенсированная постоянная времени будет определяться по формуле [2]:
 ,
,
где f=50 Гц – частота питающей сети;
m=6 – число пульсов за период.
 с.
с.
При переходе от тиристорной схемы к транзисторной – запаздывание Тμ может быть уменьшено.
Определим коэффициент передачи тиристорного преобразователя из следующих соображений. Если принять, что максимальный выход регулятора 10В обеспечивает подачу на двигатель 220В, то коэффициент передачи выпрямителя будет равен:
 .
.
2) Рассчитаем передаточные функции регуляторов.
Передаточная функция регулятора тока согласно (4):
 Передаточная функция регулятора скорости, настроенного на технический оптимум согласно (8):
Передаточная функция регулятора скорости, настроенного на технический оптимум согласно (8):
 .
.
Передаточная функция регулятора положения, принимая kДП=1, согласно (12):
 .
.
Передаточная функция регулятора скорости, настроенного на симметричный оптимум согласно (16):
 Передаточная функция регулятора положения, с учетом настройки контура скорости на симметричный оптимум согласно (19):
Передаточная функция регулятора положения, с учетом настройки контура скорости на симметричный оптимум согласно (19):
 .
.
3) Передаточная функция замкнутой трехконтурной системы, на основании рис.3 имеет вид:
 .
.
С учетом численных значений передаточная функция замкнутой системы при настройке контура скорости на технический оптимум имеет вид:
 .
.
При настройке контура скорости на симметричный оптимум на основании рис.5 передаточная функция замкнутой системы:
 .
.
Или с учетом численных значений:
 .
.
На рис.6 представлены переходные процессы системы, построенные с помощью программы Mathcad без учета нагрузки:
1 – с настройкой контура скорости на технический оптимум – передаточная функция W1(р);
2 – с настройкой контура скорости на симметричный оптимум — передаточная функция W2(р)).
Рис.6. Переходные процессы трехконтурной системы
На основании данных графиков можно сделать следующие выводы:
— система позиционирования отрабатывает задающее воздействие при обоих способах настройки контура тока за одинаковое время t=0,15 с;
— перерегулирование в системе при настройке контура тока на симметричный оптимум уменьшается ≈ в 1,7 раз по сравнению с настройкой на технический оптимум.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Чем характеризуются режимы систем регулирования положением?
2. В чем заключается принцип подчиненного регулирования?
3. Как определяются малые некомпенсируемые постоянные времени каждого контура?
4. Как определяются параметры регуляторов контура тока, скорости и положения, если они настроены на технический оптимум?
5. Как определяются параметры регулятора контура скорости, если он настроен на симметричный оптимум?
6. Как изменятся характеристики трехконтурной системы после настройки контура скорости на симметричный оптимум?
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им. Даля 166
- ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им. Макарова 543
- НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им. Герцена 123
- РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им. Каразина 305
- ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Полный список ВУЗов
Чтобы распечатать файл, скачайте его (в формате Word).
Источник