Тема раздела Коптеры. Комплектующие, сборка, настройка. в категории Квадрокоптеры и мультироторы; Сообщение от Павел 28 Не подскажете куда копать? Enable motor and servo output.
Опции темы
Enable motor and servo output
Мотор включил, все равно не работает(( Похоже проблема в том, что газ висит на другом канале. Не подскажете как их можно переназначить?
Последний раз редактировалось Павел 28; 12.09.2018 в 22:33 .
Сверху порядок каналов буквами указан TAER или AETR
а где это чуть конкретнее? В миксах не нахожу
где ресивер. просто меняй порядок букв
А где они тут меняются и как? Я так понял их можно поменять только через командную строку
Не правильно поняли. Справа от «AETR» стрелочка — жмите и выбирайте
да просто стирайте буквы и пишите как надо
Там можно выбрать только тип аппаратуры управления
Более-менее победил нормальную остановку в режиме GPS. Теперь осталась одна беда — полёт в режиме «корова на льду». Два дрона на матеке под айнав (а учитывая, что один из них очень сильно перебран, то все три) и у обоих одно и то же — летим как хотим, главное почти в ту сторону куда надо Точнее это можно описать так. Летим прямо (именно передом вперёд), поворачиваем куда-либо, летим, в принципе, в ту сторону, куда повернули, но не обязательно передом вперёд Боком, по диагонали, как угодно, но только не четко передом. Сравниваю с Pixhack и Pixhawk-mini — там всё четко. А здесь как-то размыленно. Крутил уже все PIDы по всякому. В полете то же есть неприятный момент. Развиваем скорость свыше 30 км/час и начинает крутить носом. Т.е. теряется курс и приходится стиком постоянно подруливать. При этом нет какой-то постоянной привычки поворачивать в какую=то конкретную сторону. Как дуд-то встречным ветром сдувает. Это как-то лечится ?
Такая же беда. В режиме жпс и ртл коптер летит полубоком. Хочу лететь вперёд а он летит под некоторым углом левее. Включал автоопределение склонения, отключал автоопределение, уменьшал на градус значение склонения вручную, пробовал и ублокс и ублок7 бесполезно. Компас стоит правильно, высоко над коптером на стойке, смотрит ровно ровно вперёд.Компас TS100 мини. Айнав- загадка..
Да у меня как-то без разницы, какой режим включен. ЖПС, стабилайз, альтхольд. Фиолетово. Какой-то режим такой смешанный с «интеллектуальным» получается Такой режим есть на многих контроллерах, когда дрон летит в нужную сторону независимо от того, как он развернут Т.е. я могу спокойно летать прямо. Если не развить большую скорость, всё стабильно и нормально. Но стоит повернуть и он, как бы, поворачивает нос в нужную сторону, но летит не совсем туда куда повернут нос Попробую видео с дрона на ютубе залить. В принципе там видно это безобразие. Я бы мог погрешить на инерцию, но дрон не тяжелый. На пиксхавк-мини собран примерно такой же комплектации — там всё четко. Так-то оно летать не мешает конечно, он не для гонок, но размазня эта несколько раздражает.
Источник
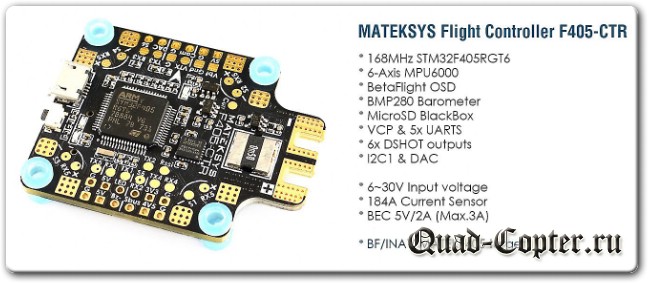
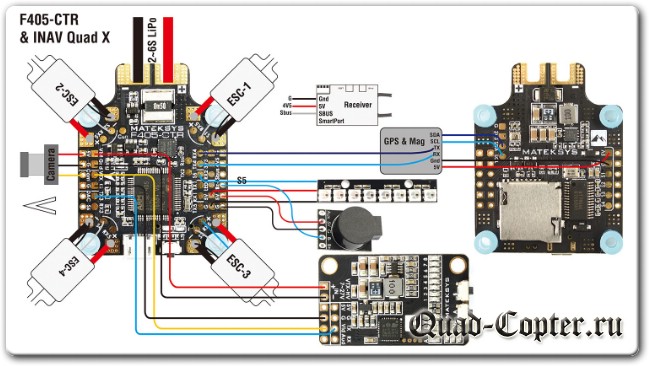
Обзор Matek F405-CTR
Matek Systems BetaFlight F405-CTR Flight Controller Built-in PDB OSD 5V/2A BEC Current Sensor for RC Drone — это отличный полетный контроллер для тех, кто хочет летать по FPV!
В отличии от полетных контроллеров Omnibus F7 V2 и Omnibus F7 Pro, которые рассчитаны на любителей дронрейсинга и фристайла, Matek F405-CTR разработан для тех, кому нужен от квадрокоптера ровный и стабильный полет.
То есть, основное назначение квадрокоптера с таким полетным контроллером — видеосъемка и дальние полеты, именно в таких условиях, этот ПК покажет свои сильные стороны.
Разработчики F405-CTR ориентировали его под прошивку iNav, то есть именно полетов с использованием навигации и автономных полетов, на контроллере квадрокоптера есть I2C порт, что позволяет подключить не только GPS, но и магнитометр (компас), вместе со встроенным бародатчиком, это позволяет выполнять полностью автономные полеты.
Еще одной фишкой данного полетного контроллера является использование гироскопа MPU6000, эта модель слабо чувствительна к тряске и высокочастотным вибрациям. Поэтому ее нет смысла прятать в гелевую подушку, как на F7 V2, но он менее быстрый и это ухудшает реакцию полетного контроллера при выполнении скоростных фигур фристайла.
Характеристики Matek F405-CTR
Бренд: Matek Systems
Название элемента: F405-CTR
Размер: 36×46 мм печатная плата с монтажными отверстиями 30,5 мм
Вес: 10 грамм
Технические характеристики:
MCU: 168 МГц STM32F405
IMU: акселерометр / гироскоп MPU6000 (SPI)
Баро: BMP280 (I2C)
OSD: BetaFlight OSD с чипом AT7456E
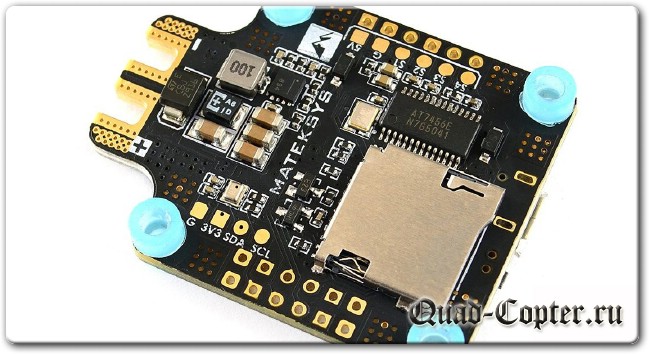
Blackbox (черный ящик для полетных логов): слот для карт MicroSD (SD / SDHC)
VCP, UART1, UART2, UART3, UART4, UART5
Встроенный инвертор для входа SBUS (UART2-RX)
PPM / UART Shared: UART2-RX
SoftSerial на TX2, S5 или S6 (настраивается опционально)
Управление камерой на S6 или ЦАП (настраивается опционально)
3 светодиода для отображения статусов (синий, красный) и индикатор 3,3 В (красный)
Выход 6x PWM / DShot без конфликтов
5x UART
1x Группа выводов G / S1 / S2 / S3 / S4 для 4in1 ESC Signal / GND
4x пары выводов для соединений ESC / GND (совместим с DSHOT)
1x пара I2C1 колодки
1x Кнопка бокового нажатия для режима BOOT (DFU)
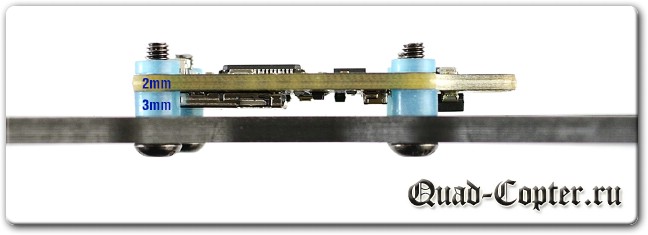
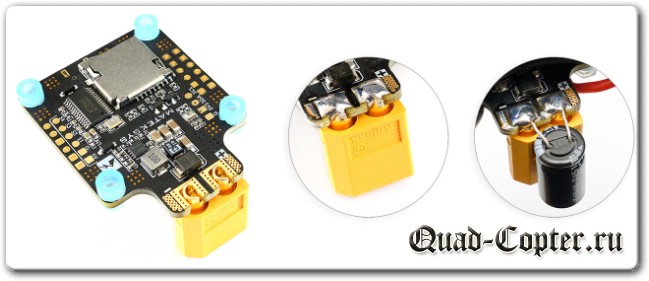
В комплектацию поставки входит конденсатор, силиконовые виброзащитные стойки и плата для дополнительного оборудования.
Силиконовые стойки позволяют выиграть место по высоте при креплении платы.
Конденсатор крепится параллельно подключению питания.
При подключении внешнего оборудования пользуйтесь инструкцией, разработчики максимально описали все возможные подключения и настройки.
Полетный контроллер использует встроенное OSD, а так же позволяет управлять настройками FPV камеры с вашего пульта управления, эмулируя подключенный к FPV камере джойстик.
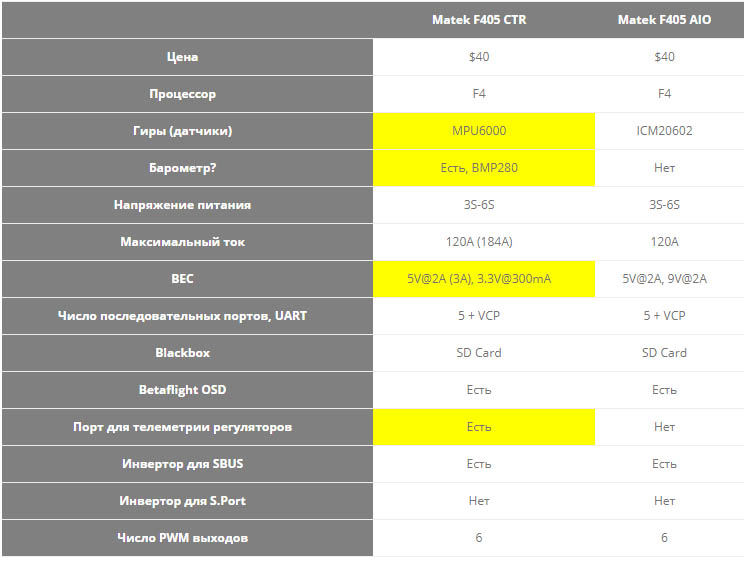
Внимание! В продаже есть 2 версии полетного контроллера F405-CTR и F405-AIO. Ссылка в конце статьи ведет на CTR вариант. При покупке на АлиЭкспресс, недобросовестные продавцы часто отправляют AIO вместо заказанного CTR, тк на AIO спроса нет.
Таблица различий между F405-CTR и F405-AIO
Убедитесь перед покупкой, что вы заказываете именно то, что хотите!
Видеообзор Matek F405-CTR
Если вы заинтересовались квадрокоптером на видео, то смотрите эту статью, в ней даны ссылки на электронику и раму квадрокоптера.
Как обновить прошивку на F405-CTR
На видео выше показана процедура обновления прошивки на Matek F405-CTR, смотреть с 2:57.
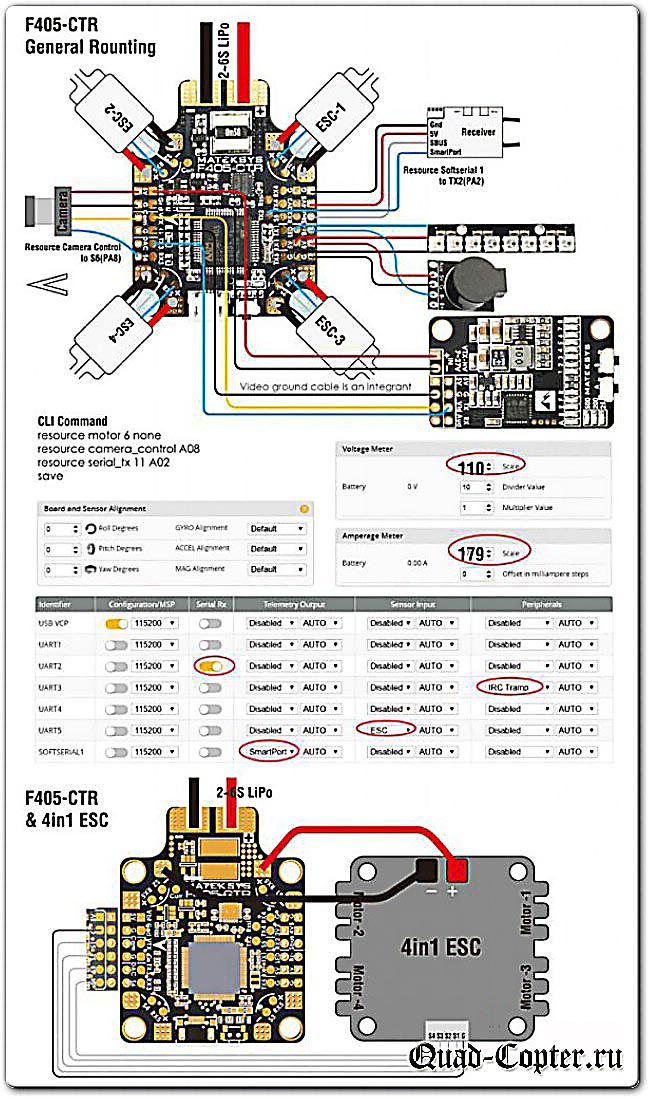
Настройка Matek F405-CTR
На рисунке выше показаны настройки конфигуратора для полетного контроллера квадрокоптера Matek Systems F405-CTR.
Где купить Matek F405-CTR
Вы так же можете найти этот товар на AliExpress
Источник
Полетные контроллеры Matek Systems
Тема раздела Коптеры. Комплектующие, сборка, настройка. в категории Квадрокоптеры и мультироторы; А обязательно припаивать сигнальный минус от регулятора, или достаточно только управляющего сигнала.
Опции темы
А обязательно припаивать сигнальный минус от регулятора, или достаточно только управляющего сигнала?
Это то о чем я и написал. Надеюсь матек действительно предусмотрел достаточно меди внутри.
Насчет этого много копий сломано. Мне например нетрудно ещепроводок припаяиь ))
Да припаять то не трудно, вопрос на что это влияет и как? Если не припаивать, то получается что то типа экрана, а если припаять, то уже контакт земли ( которая и так эсть) и эфект экрана исключается. Или я заблуждаюсь?
Я вот вапще нулина в радиоэлектронике. Но понятие «земляная петля» слышал, и считаю, что если сигнал с минусом заплести в косичку и припаять как положено, то хуже точно не будет.
На помехи. Сильно. Несколько лет назад один буржуйский товарищ выкладывал видео, где на осциллографе сравнивал управляющий сигнал с землей и без. Так вот, с землей сигнал был раз в несколько чище. Принципиально, чтобы земляной провод был перевит с сигнальным. А вообще, даже не в импульсной электронике, правило хорошего тона разделять силовые и сигнальные цепи. Иногда даже опторазвязки применяют.
Добавлю, что особо это все чувствительно становится когда речь идёт о multishot или dshot600+, т.н. О быстрых протоколах. Не зря кондерами все обвешивают по самое нихочу.
Спасибо всем за отклик, я вас услышал. На данный момент идея такая: ПК запитывать от батарейки, регуль через ПК транзитом. Производитель такое допустил. То, что я использовал другие площадки, не думаю, что вызовет проблемы, слишком незначительные расстояния.
Вариант с раздельным питанием и отсылом данных о токе в ПК понял.
Землю сигнальную с регуля на ПК пока не распаял, но не отрезал. Из любопытства потом потыкаю осциллографом куда-нибудь)) Где там какие шумы должны (или могут) возникнуть? Что замерять?
Пока так: Сегодня постараюсь изобразить раму из палок и. ну, из чего-нибудь)
Очень много вибраций на полетник зайдет при такой компоновке и таких силовых проводах.
Шина до отдельных пятаков по углам явно меньше площади входной площадки. Лучше минус от батареи сразу на ESC, от него тонким мягким проводом на минус полётника. Существенно меньше потерь будет. Плюс от ESC на второй вывод токового шунта.
Докладываю. Заработали 3DR-модемы, но на 57К, а не на 115, как говорил коллега в соседней теме. Видимо у меня старая прошивка. Досконально не проверял, но все вкладки настроек зайти удается, кроме вкладки ОСД. В общем, этого достаточно. Несмотря на все мои издевательства, контроллер все еще жив. )
Принято, заменю на помягче. Их есть у меня.
А с компоновкой прошу уточнений, планировалась «башня» или как там ее.
Оно конечно, но производитель таки рисует, что можно на них подключать. С другой стороны, коли регуль имеет датчик тока, то можно ему и напрямую питание дать, а с датчика кинуть проводок на полетник. Варианты есть, скажем так. На досуге можно будет попробовать так и эдак.
Последний раз редактировалось ironman80; 25.02.2018 в 01:33 .
Помогите соединить F4 OSD с LED WS2812B все от матека Хочу подключить в режиме FC, подключаюсь как указано на картинке: подключаю питание, щелкаю кнопкой пока не перестанут гореть светодиоды — это переход в режим FC, долго удерживаю кнопку нажатой — типо сохранение, контакт DIN- паяю на контакт LED пк. Подключаюсь к бетафлаю, в конфиге включаю лед трип, сохраняю, на вкладки лед настраиваю свечение диодов, давлю сейв, но диоды не стали гореть (хотя на ютубе на видео видно что при нажатии сейв светодиоды сразу начинают светится, как выставлено в настройках), передергиваю питание — диоды загораются как настроено, хотя тоже криво как то — на арм и на повороты не реагируют. Отключаюсь от БФ . Включаю пульт, коптер — диоды не горят. подключаюсь к БФ пердергиваю питание на коптере — диоды горят. Такое впечатление что LED панель всегда в режиме ХТ. Где я делаю неправильно или что то пропускаю?
A что значит в режиме FC?У меня никаких танцев не было.Включил ползунок в конфигураторе,перезагрузил с сохранением,подпаялся и настраиваю как удобно.Это всё в BF. А вот вопрос про INav: В доках нарисовано ,ЛЕД подключать в S5 так как Лед площадка запаралелина с SCL SDA подключен компас(на сколько я понял),но INav не умеет ремапит порты.Как же тогда на S5 LED подключать и настраивать.Или я что то не так понимаю?Поправьте меня,обьясните дураку. Спасибо.
F405 CTR. Спецом под Inav брал.А тут опять что то колхозить приходится(инвертор паять под СПорт для X8R) Тепель с LEDом непонятки какието.
С офсайта 1.8.0.Говорят стабильная,на 1.9 пока переходить рано.
Это с гитхаба. «MATEK F405-CTR is supported by development and will be supported by 1.9»
Мой совет такой — летайте пока без LED. Но если прямо очень хочется — то делайте бэкап настроек и шейте последний RC
Секундочку, просто так по этой схеме нельзя подключать?
Ну я так и сделаю.Подождем ,не критично.
Через софтсериал можно
Эта инфа была на вкладке »распайка BF» по этому даже не пробовал.Поздно увидел.Работает или нет не знаю.А вот мой распаеный колхоз точно пашет(проверено).
Софтсериала на inave 1.8.0 нет.
Последний раз редактировалось segaru1; 02.03.2018 в 16:46 .
Тогда оставляю как есть, пока придет время летать, оно уже и выйдет))
Просветите,разве на софтсериал можно повесить ЛЕД. Просто ворпрос был про свет.С телеметрией то я уже разобрался.
Сейчас inav знает две версии плат. F405-OSD и F405-AIO. F405-CTR новая плата. Если шить ее в версию 1.8.0 нет гарантии, что она полностью заведется, так как там ноги процессора могут идти на другие площадки. Теоретически у процессора выводы общего назначения. Так что туда можно повесить почти что угодно. Те бета-аерсии которые я видел предполагали что S5 превратиться в tx для софтсериалв
Шил прошивкой с матековского сайта.а столе все завелось,завтра в поле подлетну,глянем.
Какие-то странные у них полетники на F411, мало портов, медленные, без i2c, зачем?
Это маркетинг, пипл хавает ) Там же приемник/телеметрия по протоколу f.port по spi. не не так — FrSky X SPI RX protocol
Последний раз редактировалось MFer; 06.03.2018 в 11:56 .
Так и подумал, у миделика год назад был F3 полетник с таким приемником. Этот надеюсь будет дешевле.
Приёмник встроенный? Да ещё и телеметрийный? Вполне нормальный гоночный полётник. Меньше плат, меньше проводов.
Хотя не совсем. Blackbox они зажали.
Привет! Подскажите неопытному! Можно ли подключить к matek 405ctr приемник по pwm и как можно подключить runcam 2 (есть адаптер). На старый полетник приемник подключал по pwm, а камеру подключал к приемнику. Приеник TGY-iA10. Спасибо всем кто ответит!
Прошу помощи в подключении RSSI от приёмника XSR у которого подпаял к выходу на плате (т.е. там есть RSSI в PWM). Контроллер Matek F405-STD у которого по описанию площадка под пайку RSSI: FRSKY PWM input. В Betaflight этот RSSI опция может включаться в конфигураторе только в аналоге или через канал PWM приёмника. Последний вариант — это видимо нужно долго шаманить с пробросом сигнала PWM RSSI на канал (обычно этот RSSI в некоторых приёмниках на канале 8), т.е. это сложно и мне не подходит. Есть ли способ включения штатной площадки RSSI контроллера в режим PWM, например, может есть какая команда через CLI , которая переключит из аналога в PWM? Получается что контроллер Matek F405-STD может, а Betaflight не поддерживает PWM на RSSI. Есть конечно вариант подключить RSSI с RC фильтром и будет аналог — это последний вариант если нет решения этой проблемы. Конфигуратор последней версии 10.2.0. Ранее этим конфигуратором не пользовался, а больше увлечён АРМ , но сейчас решил построить маленький квадролёт, т.е. в этой теме я начинающий.
Точнее это можно описать так. Летим прямо (именно передом вперёд), поворачиваем куда-либо, летим, в принципе, в ту сторону, куда повернули, но не обязательно передом вперёд
 Точнее это можно описать так. Летим прямо (именно передом вперёд), поворачиваем куда-либо, летим, в принципе, в ту сторону, куда повернули, но не обязательно передом вперёд
Точнее это можно описать так. Летим прямо (именно передом вперёд), поворачиваем куда-либо, летим, в принципе, в ту сторону, куда повернули, но не обязательно передом вперёд